Beliebte Suchen
Empfohlene Beiträge



Suchergebnisse
“Perseverance” ist schon die zweite Generation der großen, rollenden Mars- Labore.
Das erste ist das MSL (Mars Science Lab), dass bereits 2008 gelandet ist. Besser bekannt unter dem Namen “Curiosity”.
 Perseverance ist 2020 unter dem Projektnamen “Mars2020” gestartet und im April 2021 erfolgreich auf dem Mars gelandet. Größer und schwerer als Curiosity bringt Percy sogar den fliegenden Companion “Ingenuity” mit.
Perseverance ist 2020 unter dem Projektnamen “Mars2020” gestartet und im April 2021 erfolgreich auf dem Mars gelandet. Größer und schwerer als Curiosity bringt Percy sogar den fliegenden Companion “Ingenuity” mit.
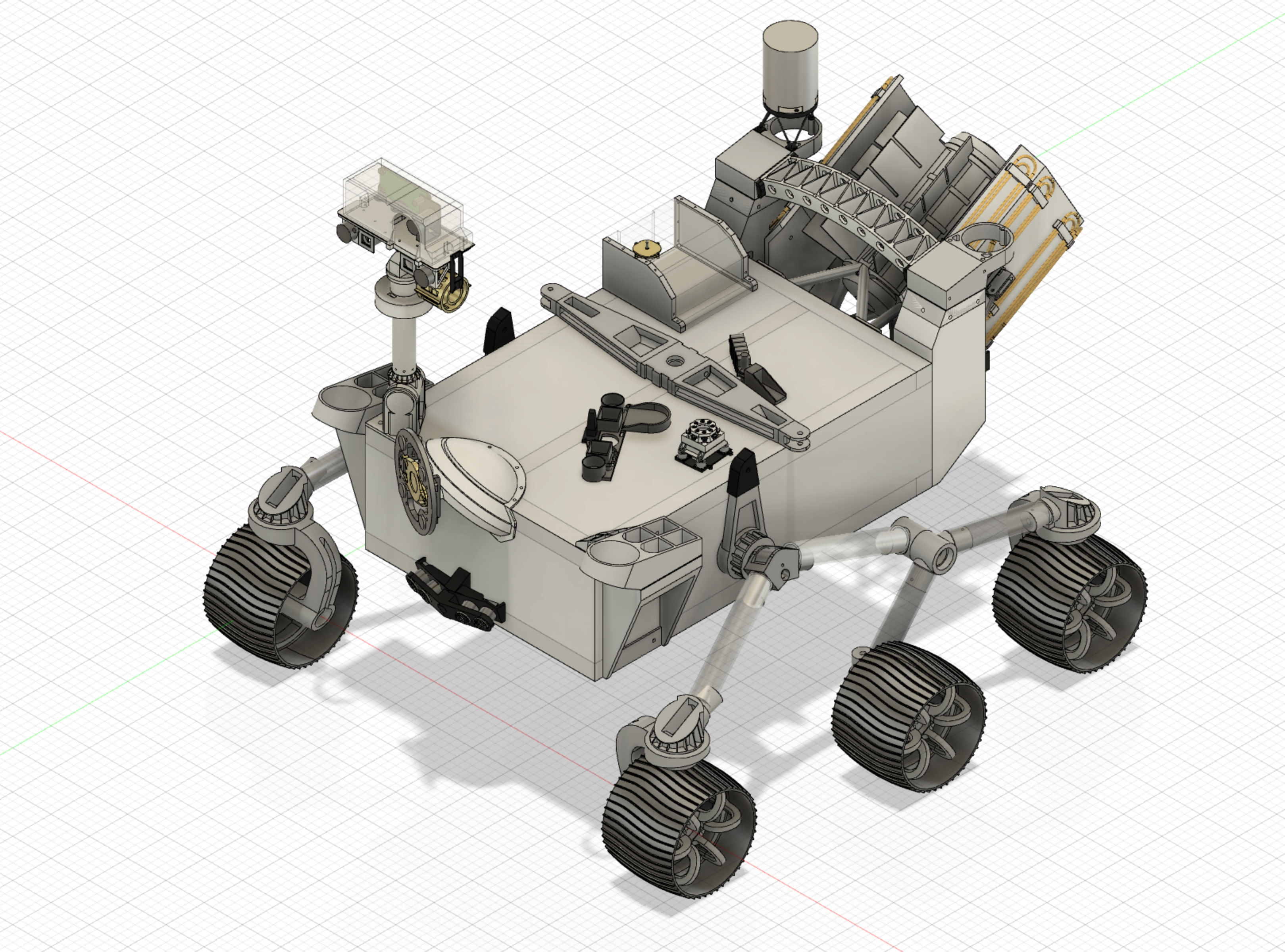
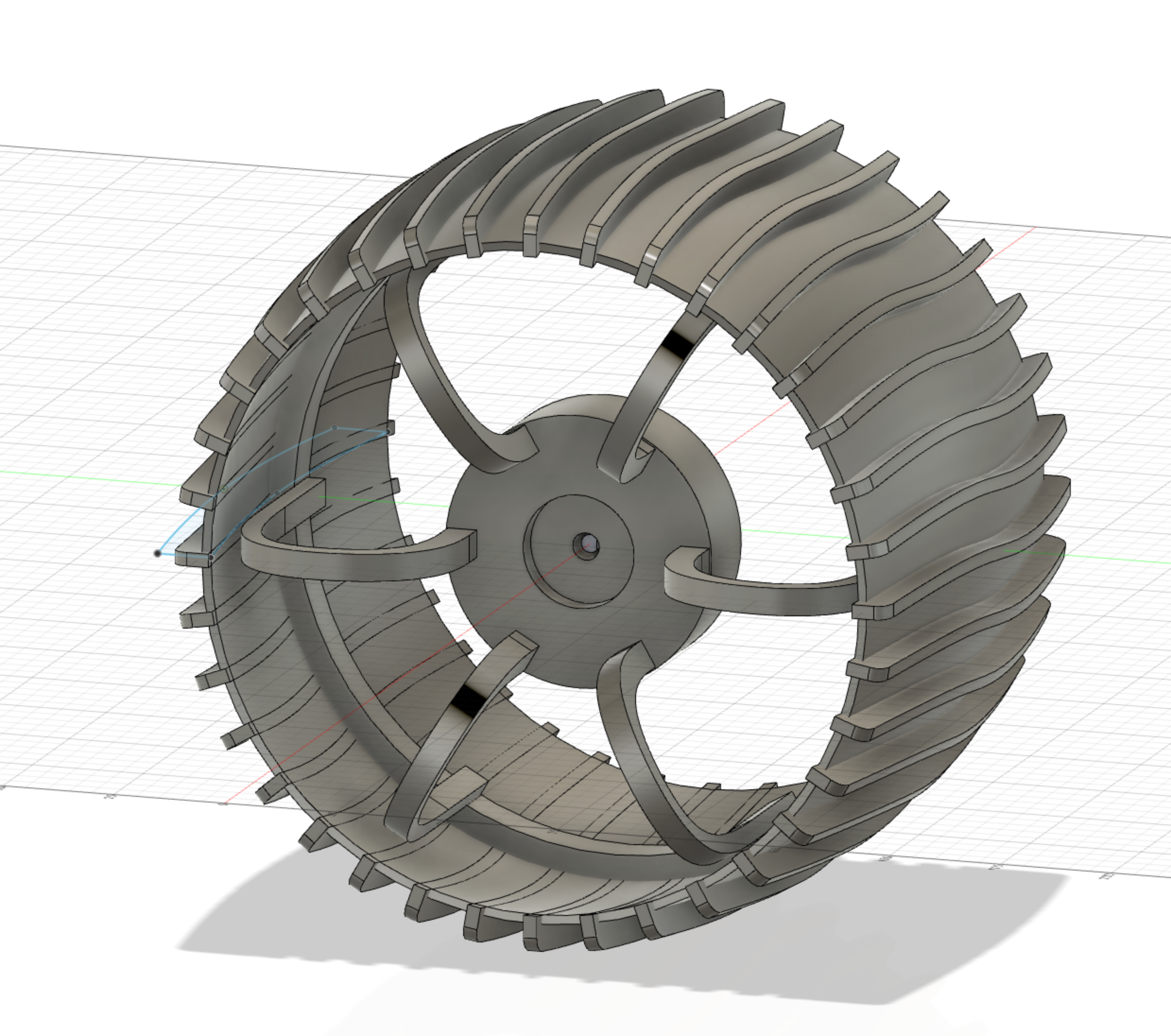 Aus dem einfachen Kommentar, ich könnte in meine Raumschiffmodelle ja Servos einbauen, um Geschütztürme drehbar zu machen. ist dieses große Projekt entstanden. Perseverance war gerade gelandet und in aller Munde. Einer spontanen Eingebung folgend, modellierte ich Ende Februar eines der Räder in Fusion360. Nur 26 Tage später stand das Grundgerüst auf sechs davon und konnte sich bereits ferngesteuert bewegen. Alle Einzelteile werden per 3D-Druck Verfahren hergestellt. Zur Stabilisierung des Hauptkörpers kamen Alu-Profile zum Einsatz.
Aus dem einfachen Kommentar, ich könnte in meine Raumschiffmodelle ja Servos einbauen, um Geschütztürme drehbar zu machen. ist dieses große Projekt entstanden. Perseverance war gerade gelandet und in aller Munde. Einer spontanen Eingebung folgend, modellierte ich Ende Februar eines der Räder in Fusion360. Nur 26 Tage später stand das Grundgerüst auf sechs davon und konnte sich bereits ferngesteuert bewegen. Alle Einzelteile werden per 3D-Druck Verfahren hergestellt. Zur Stabilisierung des Hauptkörpers kamen Alu-Profile zum Einsatz.
Seitdem werden weitere Details modelliert und hinzugefügt.
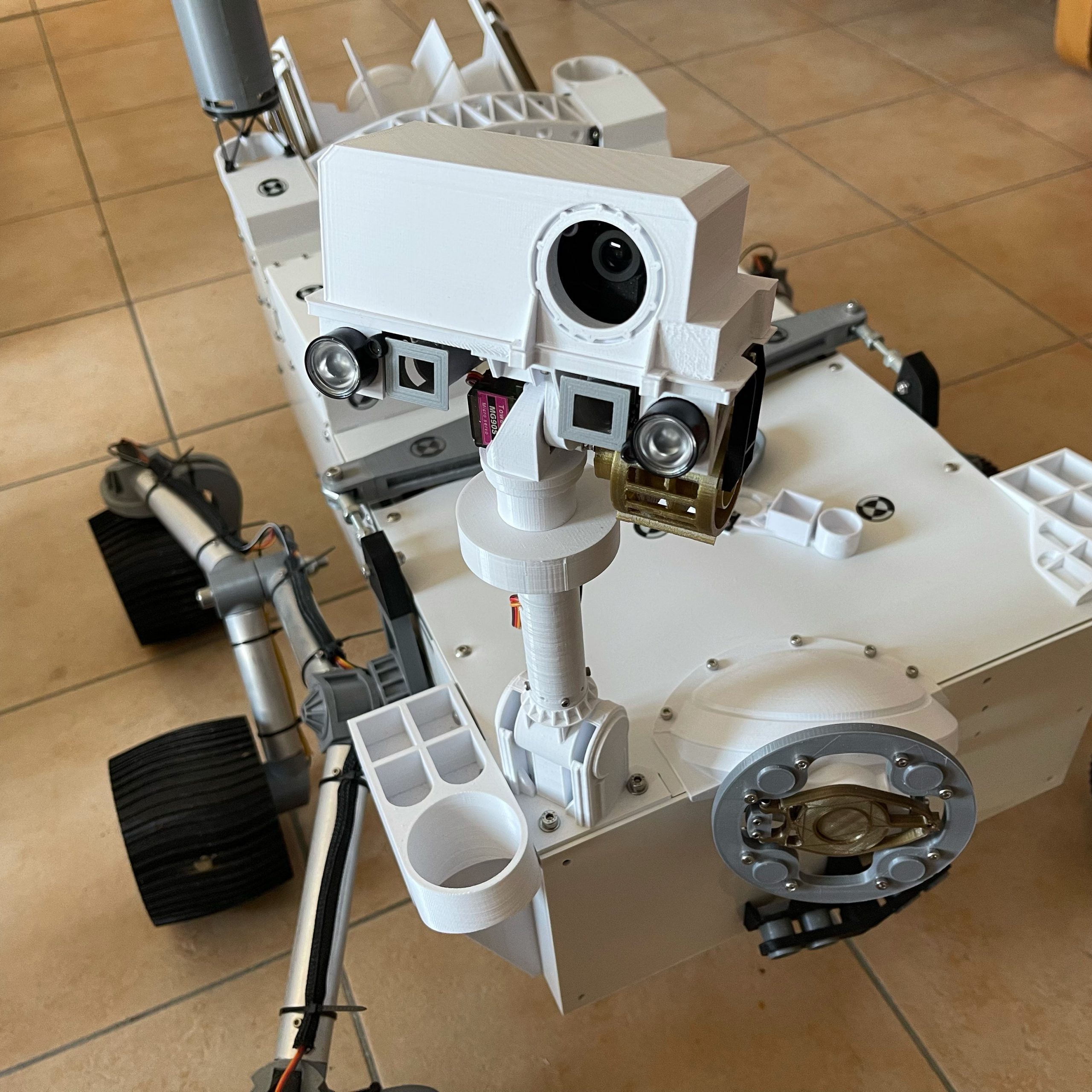
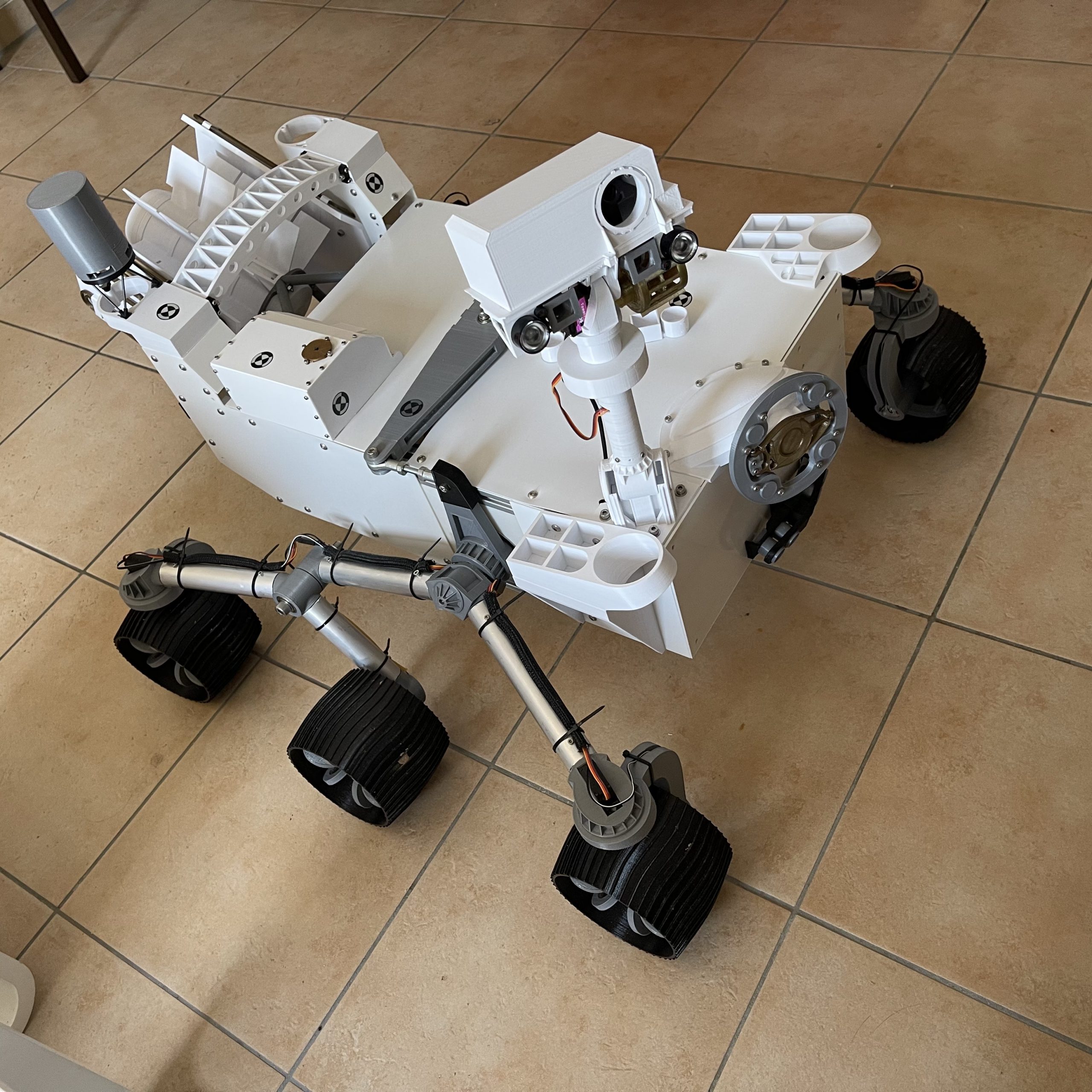
Inzwischen hat Percy ein voll funktionierendes Fahrwerk, kann lenken wie ein Automobil oder auch auf der Stelle rotieren. Der Kameraturm kann sich um sich selbst drehen und neigen. Zwei Kameras verteilen sich auf den Turm und vorne am Body. Eine, um sich umsehen zu können und eine, um den Fahrweg zu erkennen. Die eine Linse im Kamerakopf kann mit zwei RGB-LEDs ausgeleuchtet werden, was ihm einen bösen Blick (rot, z.B. in Anlehnung an HAL9000) geben kann. Außerdem findet sich im Kameraturm ein Laserpointer-Modul.
Zusätzlich zur Beweglichkeit und der Möglichkeit zu sehen, kann Percy auch akustisch interagieren. Über zwei Lautsprecher lassen sich vorgewählte Soundfiles aus Film und Fernsehen abspielen (Wall-E, Terminator, Nr. 5).
 Dieses Foto hat Percy von sich selbst gemacht.
Dieses Foto hat Percy von sich selbst gemacht.
Percy habe ich als Langzeit-Projekt angelegt. Alle Elemente sind verschraubt und können mit der Zeit durch bessere, hübschere oder stärkere Teile ausgetauscht werden, um neuen Anforderungen zu entsprechen.
Eines der wichtigsten Elemente an den Rovern ist der Instrumenten-Arm. Dieser befindet sich noch in Entwicklung.
Alle Dateien zu diesem Projekt habe ich auf GitHub veröffentlicht. Dort finden sich 3D-druckbare Objekte sowie die Software für den Rover und iPhone.
Zur GitHub Projektseite.
Länge: 82cm
Breite: 70cm
Gewicht: 9,6kg
Geschwindigkeit: ca. 3km/h
Arbeitsumgebung: 7,5V bei 7A
Servos: 6
Motoren: 6
Gehirn(e): Raspberry Pi 3b + Raspberry Pi Zero W
Kamera 1 im Body: ESP32 Cam
Kamera 2 im Turm: Raspberry Cam in HD
Fernsteuerung: iPhone + Playstation 4 Gamepad
Jeanette Müller, Kornwestheim (Juni 2021)